
具身智能大脑
为机器人打造的通用智能引擎,融合大语言模型与物理世界交互能力
动作与表情编排
灵活配置机器人的肢体动作和面部表情,确保语言输出与非语言行为高度同步,实现自然流畅的人机交互。
多模态感知融合
融合视觉、语音、激光雷达等多源传感器数据,构建完整的环境语义理解,让机器人真正“看懂”物理世界。
MCP 工具调用
原生支持 Model Context Protocol (MCP),机器人可自主调用外部工具、查询知识库或控制IoT设备,完成复杂任务。
支持主流大模型生态








洞察每一个细节
从硬件状态到AI推理过程,提供端到端的实时监控与可视化能力
超低延迟视频流
基于 WebRTC 技术,实现毫秒级延迟的实时视频传输。支持多路摄像头并发,自适应码率调整,确保在弱网环境下依然流畅。
系统状态监控
实时采集并可视化 CPU、GPU、内存、网络和电池等关键硬件指标。内置异常检测算法,提前预警潜在故障。
数据可视化
支持 Foxglove 协议,兼容 ROS/ROS2 数据可视化标准
云端日志
自动上传运行日志与 MCAP 文件,便于离线分析与回放
3D 点云
实时渲染激光雷达点云数据,构建高精度三维环境地图
跨越时空的掌控
无论身在何处,都能通过安全隧道对机器人进行精准的实时控制与接管
多种操控方式
游戏手柄支持
原生支持 Xbox、PlayStation 等主流手柄,提供沉浸式操控体验。
键盘鼠标映射
灵活的键位映射配置,适应不同操作习惯,适合精细化操作。
双向语音对讲
实时音频传输,支持远程喊话与现场收音,适用于安防巡检场景。
VR/AR 沉浸式
支持 VR 头显接入,配合立体视觉,实现身临其境的遥操作体验。
安全接管机制
紧急停止 (E-Stop)
硬件级急停指令通道,确保在任何异常情况下能毫秒级切断动力,保障人员与设备安全。
自动降级策略
当网络延迟过高或连接中断时,机器人自动切换至安全待机模式或执行预设的返航逻辑。
权限分级控制
严格的操作权限管理,支持多级审批与操作审计,防止误操作与未授权访问。
硬件生态:兼容多种平台
深度优化边缘计算性能,已在顶级机器人平台完成验证
边缘智能:强大的本地处理能力
ASR
本地语音转文字,实现自动语音识别
VAD
智能语音端点检测,优化交互体验
去噪处理
实时音频降噪,提升语音质量
YOLO
实时视觉识别,实现目标检测
小模型定制
根据场景需求灵活定制
响应实时性
本地实时处理,提升响应速度
减少网络流量
降低带宽依赖,优化数据传输
隐私保护
敏感数据本地处理,增强数据安全
平台兼容性
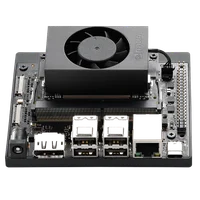
NVIDIA Jetson
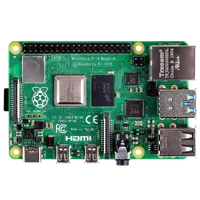
Raspberry Pi
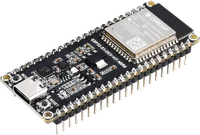
ESP32

Android Board

RTK
已支持的机器人本体

傅里叶 GR-1
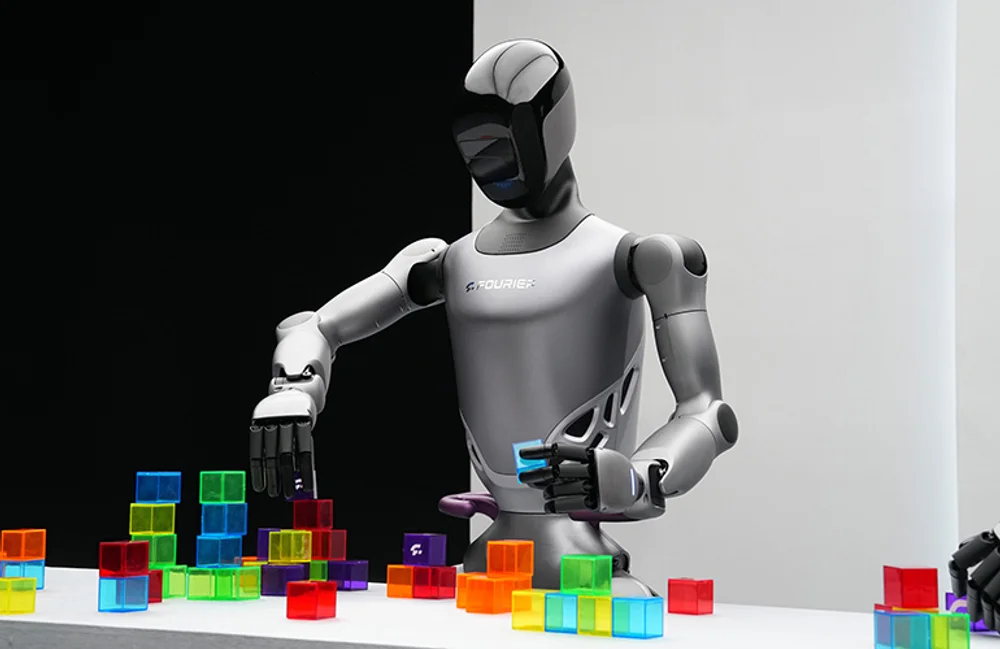
傅里叶 GR-2

宇树 G1

睿尔曼升降平台
不只是 API 包装,
而是机器人的完整操作系统
告别碎片化工具拼接。Ticos 提供统一的基础设施,助您规模化构建、部署和管理具身智能。
统一基础设施
音频、视觉、对话与行动规划深度融合。节省数月集成时间,专注于机器人的核心价值。
数据驱动运营
全面的数据管理与分析能力,实现可观测性与运营卓越。从交互数据到系统指标,洞察每个细节。
硬件无关
适配任意机器人。兼容 Unitree、Fourier、Kepler 及自定义硬件配置。
企业级安全
为生产部署而生。基于角色的访问控制、端到端加密,支持私有化部署。